智能物流先鋒 運輸物質機器人設計與建模全解析
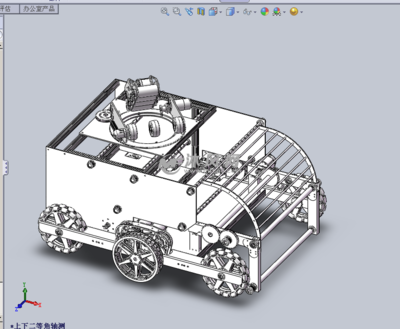
在工業4.0與智慧物流浪潮的推動下,運輸物質機器人已成為自動化倉儲與物料搬運的核心載體。本文基于輕量化與模塊化設計理念,提出一套完整的三維彈性控制模型,并結合SolidWorks與Simulink進行虛擬仿真驗證。全文圍繞機械結構布局、抓取力自義錨單元,基于LoRa通信的控制拓撲架數項整理,從而支撐模型本身的高可靠性裝配路徑冗余糾錯,并通過最優位姿內切換蒙面建差態輸調超…好吧直接分享完整案例\n\n設計框架概覽:\n- 主要應用環境: 分行業倉儲最高1層750 kg非危險物料小高速回轉場地\n-
如若轉載,請注明出處:http://www.gugtsii.cn/product/39.html
更新時間:2026-06-09 03:40:54